Basically the induction motor consists of two main parts, namely
- The part i.e. three phase windings,which is stationary called stator.
- The part which rotates and is connected to the mechanical load through shaft called rotor.
Stator
The stator has a laminated type of construction made up of stampings
which are 0.4 to 0.5 mm thick. The stampings are slotted in its
periphery to carry the stator winding. The stampings are insulated from
each other. Such a construction essentially keeps the iron losses to a
minimum value. The number of stampings are stamped together to build the
stator core. The built up core is then fitted in a casted or fabricated
steel frame. The choice of material for the stampings is generally
silicon steel, which minimises the hysteresis loss. The slots in the
periphery of the stator core carries a three phase winding, connected
either in star or delta. This three phase winding is called stator
winding. It is wound for definite number of poles. This winding when
excited by a three phase supply produces a magnetic rotating field as
discussed earlier. The choice of number of poles depends on the speed of
the rotating magnetic field required. The radial ducts are provided for
the cooling purpose. In some cases, all the six terminals of three
phase stator winding are brought out which gives flexibility to the user
to connect them either in star or delta. The Fig. 1 shows a stator
lamination.
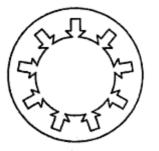 |
| Fig. 1 Stator lamination |
Rotor
The rotor is placed inside the stator. The rotor core is also laminated
in construction and uses cast iron. It is cylindrical, with slots on
its periphery. The rotor conductors or winding is placed in the rotor
slots. The two typed of rotor constructions which are used for induction
motors are,
- Squirrel cage rotor and
- Slip ring wound rotor
Comments
Post a Comment
Comment Policy
We’re eager to see your comment. However, Please Keep in mind that all comments are moderated manually by our human reviewers according to our comment policy, and all the links are nofollow. Using Keywords in the name field area is forbidden. Let’s enjoy a personal and evocative conversation.