Whenever there is a need of
connecting the rotating member of the machine to the stationary external
circuit, then slip rings and brush assembly is used.
Consider a three phase rotating star connected winding as shown in the
Fig. 1. It is required to connect external three stationary star
connected resistances to this windings. The winding must keep on
rotating and external resistance must remain stationary and still there
should be contact between the two. This is possible by slip rings and
brushes.
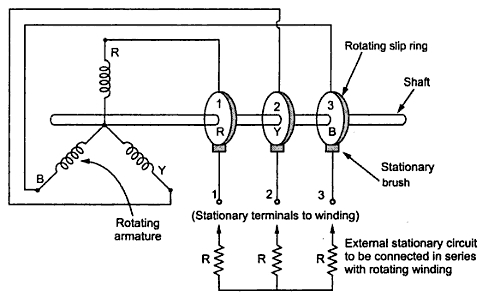 |
| Fig. 1 Concept of slip rings and brush |
The three rings made up of conducting material called slip rings are
mounted on the same shaft with which winding is rotating. Each terminal
of winding is connected to an individual slip ring, permanently. Thus
three ends R-Y-B of winding are available at the three rotating slip
rings. The three brushes are then used. Each brush is resting on the
corresponding slip ring, making contact with the slip ring but the
brushes are stationary. So rotating three ends R-Y-B are now available
at the brushes which are stationary as shown in the Fig. 1. Now
stationary external circuit can be connected to the brushes which are
nothing but the three ends of the winding.
Thus the external stationary circuit can be connected to the rotating
internal part of the machine with the help of slip rings and brush
assembly. Not only the external circuit can be connected but the voltage
also can be injected to the rotating winding, by connecting stationary
supply to the brushes externally.
Key point : Such slip rings and brush assembly plays an important role in the working of slip ring induction motor.
Comments
Post a Comment
Comment Policy
We’re eager to see your comment. However, Please Keep in mind that all comments are moderated manually by our human reviewers according to our comment policy, and all the links are nofollow. Using Keywords in the name field area is forbidden. Let’s enjoy a personal and evocative conversation.